Appliquée à la sécurité routière, cette théorie questionne la prise de risque chez les usagers de la route.
Gerald Wilde s'est inspiré des résultats des travaux de Taylor en 1964 mais également par un concept fort connu en physiologie :
- l’homéostasie.
Exemple :
Le changement de sens de circulation Suédois
Les taxis munichois
Wilde applique donc ce concept de régulation homéostatique à l’évaluation du risque, pour expliquer l’adaptation comportementale des conducteurs aux mesures de sécurité routière et la relative stabilité des données d’accidentologie malgré les mesures prises.
Le modèle d’homéostasie du risque
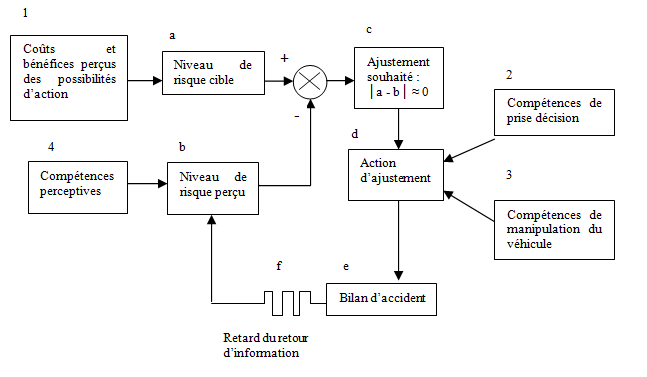
Wilde précise que l’estimation du niveau de risque par le conducteur à chaque instant est réalisée sur la base de trois sources d’informations :
- L’expérience passée du traffic
- L’estimation du potentiel d’accident de la situation en cours
- Le niveau de confiance du conducteur en ses capacités à gérer la situation et le risque
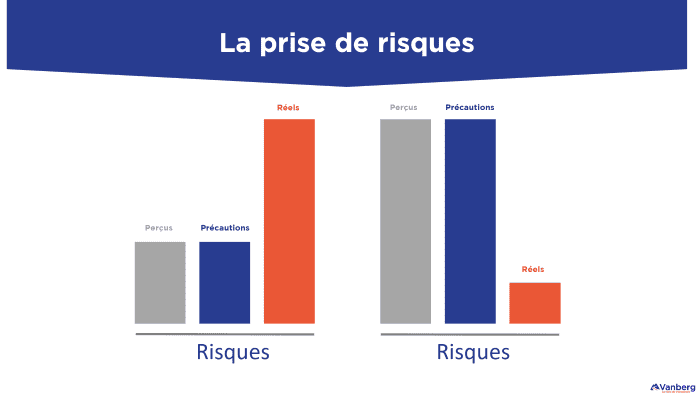
Appliqué à la prise de risque, le principe d’homéostasie aboutit à une prise de risque relativement constante de la part des personnes.
Chaque personne régulera son comportement de sorte que le risque perçu soit égal à son niveau de risque cible. Si le risque perçu est supérieur au risque cible, la personne régulera son comportement vers plus de prudence. En revanche, si le risque perçu est inférieur au risque cible, la personne régulera son comportement en favorisant la prise de risque.
L’activité de conduite est soumise à ce principe d’homéostasie.
Le conducteur régule son comportement sur la route en maintenant un certain équilibre résultant de ses connaissances, ses représentations et son positionnement face au risque.
La conduite automobile est avant tout une activité cognitive.
Tous les conducteurs effectuent une série d’opérations mentales plus ou moins complexes dans le but de prévenir les risques et éviter les dangers sur la route. Les conducteurs perçoivent les informations utiles à leur conduite, les analysent et mettent en place les mesures nécessaires pour rester en sécurité sur la route. Cette sécurité est maintenue tant que les situations rencontrées par le conducteur sont conformes à ses prévisions.
Prenons deux routes avec des caractéristiques différentes :
- La première route est une route en ligne droite, avec une circulation relativement faible. Il fait beau et l’état de la route est impeccable.
- La deuxième route est une route de campagne, présentant une série de virages avec une faible visibilité. La surface de la route présente quelques défauts et il pleut fortement.
les accidents mortels sur les routes de France ont lieu majoritairement :
- En ligne droite (72%), sur des routes de campagne (60%), par beau temps (77%), sur une chaussée en bon état (79%).
Plus de 40% des accidents mortels ont lieu sans qu’il n’y ait de collisions avec un autre usager.
Plus un conducteur percevra une situation comme risquée, plus il adoptera une conduite préventive.
Inversement, les situations perçues comme sécuritaires auront tendance à favoriser des conduites à risque.
En effet, lorsqu’il se sent en sécurité, un automobiliste est tenté de faire usage du téléphone, ou de dépasser la limitation de vitesse pour rattraper un retard.
Certains usagers négligeront le port de la ceinture sur un trajet court car la courte distance n’est pas identifiée comme un risque d’accident potentiel.
À l’inverse, la présence de radar sur une route augmente la perception du risque (risque de perdre des points sur son permis de conduire ou d’avoir une amende) et favorise une baisse de la vitesse.
Ainsi, la perception du risque est un premier levier pour agir sur les comportements sur la route.
Wilde identifie quatre voies pour modifier le seuil de risque cible dans le but de le faire baisser :
- Diminuer les bénéfices associés à la prise de risques
- Augmenter les pertes associées à la prise de risques
- Augmenter les bénéfices associés à une conduite prudente
- Diminuer les pertes associées à une conduite prudente
Jean-Pascal Assailly, psychologue et chercheur à l’Institut National de Recherches sur les Transports et leur Sécurité, dresse une liste de bénéfices associés à la prise de risque sur la route :
- La catharsis, c’est à dire se libérer de ses peurs en les revivant (vivre des situations risquées pour ne plus être anxieux face aux dangers).
- L‘acquisition de l’autonomie, c’est en pratiquant une conduite à risque qu’on créé une rupture avec nos aînés.
- La prise de risque est l’équivalent d’un rite de passage de l’enfance à l’âge adulte.
- La recherche de sensations fortes et des effets liés à la sécrétion d’adrénaline.
- Le prestige, la popularité : l’environnement social peut pousser à prendre des risques pour être « considéré ».
- Donner du sens à la vie en frôlant la mort (ordalie).
- Les bénéfices « pratiques » comme gagner du temps (en réalisant des excès de vitesse), se faciliter la conduite (en se permettant quelques « arrangements » réglementaires) ou encore optimiser son temps (en passant des appels qu’on n’a pas eu le temps de passer par exemple).